



Diseñado un arnés robótico que ayuda a recuperar la capacidad de caminar tras un ictus
M. LÓPEZ
La nueva técnica posibilita una rehabilitación más rápida y eficaz de la deambulación en pacientes que han sufrido un ictus o una lesión medular.
El ictus o accidente cerebrovascular constituye una de las primeras causas de discapacidad en todo el mundo. De hecho, la gran mayoría de los 300.000 pacientes que, solo en nuestro país, han sobrevivido a un ictus presenta algún tipo de discapacidad residual, caso de la pérdida de la capacidad para caminar. En consecuencia, y una vez sufrido el episodio, los afectados se ven abocados a pasar largas jornadas sobre una cinta de andar para recuperar la deambulación. Una terapia rehabilitadora que requiere una enorme inversión de tiempo y energía pero que no siempre ofrece resultados satisfactorios. Y es que contrariamente a como sucede al caminar sobre una cinta, en la ‘vida real’ hay cambios de direcciones, de superficies y de velocidad de la marcha. Es decir, hay muchas fuerzas gravitatorias en juego. De ahí la importancia de un nuevo estudio llevado a cabo por investigadores de la Escuela Politécnica Federal de Lausana (Suiza), en el que se describe un nuevo método que posibilita una recuperación mucho más rápida y eficiente de la capacidad de caminar en pacientes que han sufrido un ictus y otras lesiones neurológicas, incluidas las lesiones medulares.
Como explica Jean-Baptiste Mignardot, director de esta investigación publicada en la revista «Science Translational Medicine», «la recuperación de la deambulación tras un trastorno neurológico requiere una ‘reprogramación’ de la interacción entre los mecanismos corporales y las fuerzas gravitacionales. Pero a pesar de la importancia de las interacciones de la locomoción dependientes de la gravedad, estos componentes esenciales en la rehabilitación de la deambulación han recibido, por lo general, una atención mínima. Por ello, hemos diseñado un algoritmo adaptativo que personaliza las fuerzas multidireccionales aplicadas al tronco al caminar en función de los déficits motores específicos de cada paciente».
Fuerzas gravitatorias
En la actualidad, muchas de las terapias rehabilitadoras que se emplean para la recuperación de la capacidad de deambulación tras un ictus o una lesión medular incluyen un arnés que corrige la posición del tronco superior mientras el paciente camina sobre una cinta de andar. Un arnés rígido cuyo único propósito es enderezar el tronco y que no tiene en cuenta los cambios de dirección o de ritmo durante la deambulación. Quizás porque no hace falta: la dirección en la cinta siempre es la misma. Y el ritmo de marcha, por lo general, también.
Pero, ¿qué pasa si el paciente, tal y como ocurre en el mundo real, quiere, por ejemplo, ir hacia atrás o hacia los lados? En estos casos, las fuerzas de la gravedad tienen un efecto que debe ser compensado por la posición del tronco. Lo cual no puede llevarse a cabo si el arnés es rígido.
La recuperación de la deambulación requiere una reprogramación de la interacción entre los mecanismos corporales y las fuerzas gravitacionalesJean-Baptiste Mignardot
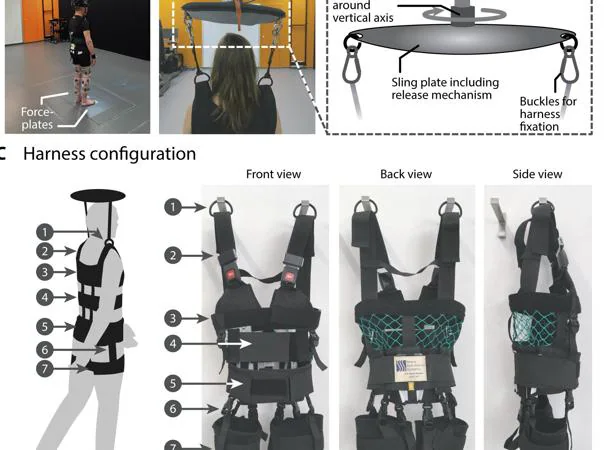
Para solventar este problema, los autores han diseñado un arnés robótico que contrarresta las fuerzas gravitatorias sobre el tronco mientras los pacientes caminan hacia delante, hacia atrás o lateralmente. Y dado que los usuarios presentan problemas motores derivados de sus lesiones neurológicas, los autores también han desarrollado un algoritmo que ajusta individualmente la posición del arnés en función del déficit motor de cada paciente.
Es más; el sistema está controlado por una red neural artificial que varía las fuerzas aplicadas sobre el arnés mediante un cable y a partir de la información de más de un centenar de variables relacionadas con el movimiento corporal.
Pero este arnés robótico, ¿funciona? Pues sí. Los resultados de este estudio, llevado a cabo con 26 pacientes en rehabilitación tras un ictus o una lesión medular, mostraron que los participantes que requerían apoyo para caminar lo hacían de una forma totalmente natural y con unas capacidades motoras similares a los de los individuos sanos gracias al arnés robótico. Y en los casos en los que los pacientes podían llegar a caminar sin ayuda, el arnés mejoró el equilibrio, la coordinación de extremidades y la colocación del pie al pisar.
Aún habrá que esperar
En definitiva, parece que el nuevo arnés robótico –y su algoritmo– es más efectivo que los arneses rígidos a la hora de procurar la recuperación de la deambulación tras una lesión neurológica. De hecho, una hora de entrenamiento sobre el terreno con el arnés y el algoritmo conllevó importantes mejoras en la capacidad para caminar sin ayuda en cinco pacientes con lesión medular, mientras que el andar sobre una cinta durante el mismo periodo de tiempo provocó que uno de los sujetos experimentara un empeoramiento real y objetivo de su locomoción.
Como indican los autores, «nuestros resultados ponen de relieve la importancia del apoyo preciso del tronco para proporcionar protocolos de rehabilitación de la marcha y establecer un marco práctico para aplicar estos conceptos en la práctica clínica rutinaria».
Y esta nueva tecnología, ¿cuándo estará disponible para su uso por los pacientes? Pues aún habrá que esperar. Como concluye Jean-Baptiste Mignardot, «a día de hoy ya estamos llevando a cabo un ensayo clínico utilizando esta estrategia de asistencia robótica para la rehabilitación de pacientes con lesiones medulares».



")



{kind=link}